TW Energy wrote:
我前面貼的那張圖,和中科院網站都有數據,單位馬力6000rpm油耗率。我不知道巡航時候高度與引擎出力,也沒有引擎曲線。
劍翔的油箱除了機身中段之外,翼根附近應該也有配置
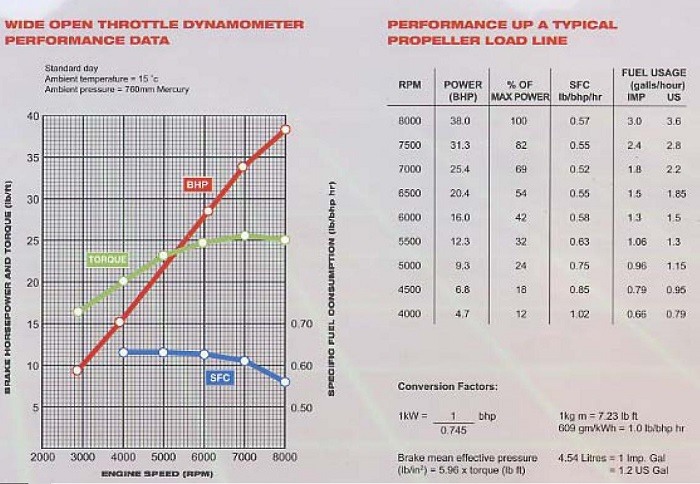
下面是RQ-7使用的AR741-1101轉子引擎的數據/曲線,208cc / 8000 rpm / 38 BHP,跟中科院那顆貼出的規格相近,看起來滯空5小時這個數據有點縮水,實際上可能超出這個數字



TW Energy wrote:
如果把EMS部分拆分開來,光電感測器加上人工智慧軟體部門,附加在無人機上另外成立專案,尋求建立一種無人機部隊,不知道會不會還是和這個產量互相衝突。

天衣神水 wrote:
近期大概只會出來飛飛作秀一下,烏克蘭那種用無人機定位,砲兵快速火力打擊的畫面至少幾年內不會出現在台灣陸軍。



天衣神水 wrote:
為什麼我會認為以「雲豹」這類步裝來說,光電頭應優先於雷達,先來看看史崔克上面MHR的規格
Minimum Target Velocity
RPS-40:70 m/s
RPS-42:5 knots
RPS-44:0.5 m/s – Perimeter Surveillance / 5 knots – Aerial Vehicles
Minimum Range
RPS-40:30 m
RPS-42:150 m
RPS-44:100 m
再看看創未來T.Radar Pro
Minimum detection Range:100 m
Velocity Resolution:1m/s, Programmable
也就是說,如果一架停在空中靜止不動或者距離太近的小型VTOL,雷達很難發現它,光電頭卻可以輕易找到它,


























































































